Chaithanya Krishna Bodduluri
Senior Robotics & AI Engineer with 7+ years of experience designing and deploying autonomous robot systems from concept to deployment. I'm at Meta, currently with the Agios team (since 2026). From Dec 2023–2025 I was with FAIR in Menlo Park, working at the intersection of robot learning, foundation models (LLM / VLM / VLA), tactile sensing, and dexterous manipulation.
Before Meta, I was a robotics & AI intern at Robert Bosch on the NASA Lunar robot program (built the AprilTag generator on this site as part of that work), and a Robotics Software Engineer with the TCS CTO Team, where I led the system architecture for the MBZIRC 2020 challenge.
Email / Google Scholar / GitHub / LinkedIn
News
- 2026 Joined the Agios team at Meta.
- 2026 AINA — Dexterity from Smart Lenses accepted at ICRA 2026.
- 2025 DexterityGen accepted at RSS 2025.
- 2025 Sparsh-X (Tactile Beyond Pixels) accepted at CoRL 2025 (Oral).
- 2025 Geometric Retargeting (GeoRT) accepted at IROS 2025.
- 2025 Sparsh-Skin accepted at CoRL 2025: self-supervised perception for tactile-skin covered dexterous hands.
- 2024 Sparsh accepted at CoRL 2024.
- 2023 Joined Meta FAIR as Senior Robotics & AI Engineer (Menlo Park).
- 2023 Graduated from Worcester Polytechnic Institute, M.S. Robotics.
- 2022 Built and open-sourced the AprilTag generator while interning at Bosch on the NASA Lunar program.
Experience
- 2026 – present Meta — Agios. Working on vision-language-action (VLA) models, dexterous manipulation, and the scalable robot infrastructure behind them — large-scale data generation, policy deployment, multi-camera (RGB / depth) calibration, and one-click dashboards that let researchers spin up experiments without touching the plumbing.
- Dec 2023 – 2025 Meta — FAIR (Fundamental AI Research), Menlo Park, USA. Senior Robotics & AI Engineer. Bi-manual teleop on FR3 Duo, Meta Unified Robotics Platform (MURP), Digit 360 GPU pipelines, contact-localization for Digit Plexus, large-scale tactile data generation.
- 2022 & 2023 Robert Bosch — NASA Lunar Project, Sunnyvale, CA. Robotics & AI Intern. Vision-only navigation in GPS-denied lunar terrain, Madgwick/Mahony IMU filters, PnP pose estimation, fiducial detection on dust-laden surfaces. (Built the AprilTag generator here.)
- Aug 2021 – May 2023 M.S. Robotics Engineering, Worcester Polytechnic Institute, MA, USA.
- Sep 2016 – Aug 2021 Tata Consultancy Services — CTO Team, Bengaluru, India. Robotics Software Engineer. System and software architecture for mobile robots and arms (ROS, C++, Python). Led the team for MBZIRC 2020; deals worth $1.2 M.
Research & Projects

AINA — Dexterity from Smart Lenses
Multi-fingered robot manipulation policies learned from in-the-wild human demonstrations captured with smart-glasses-style egocentric video. Accepted at ICRA 2026 (paper).
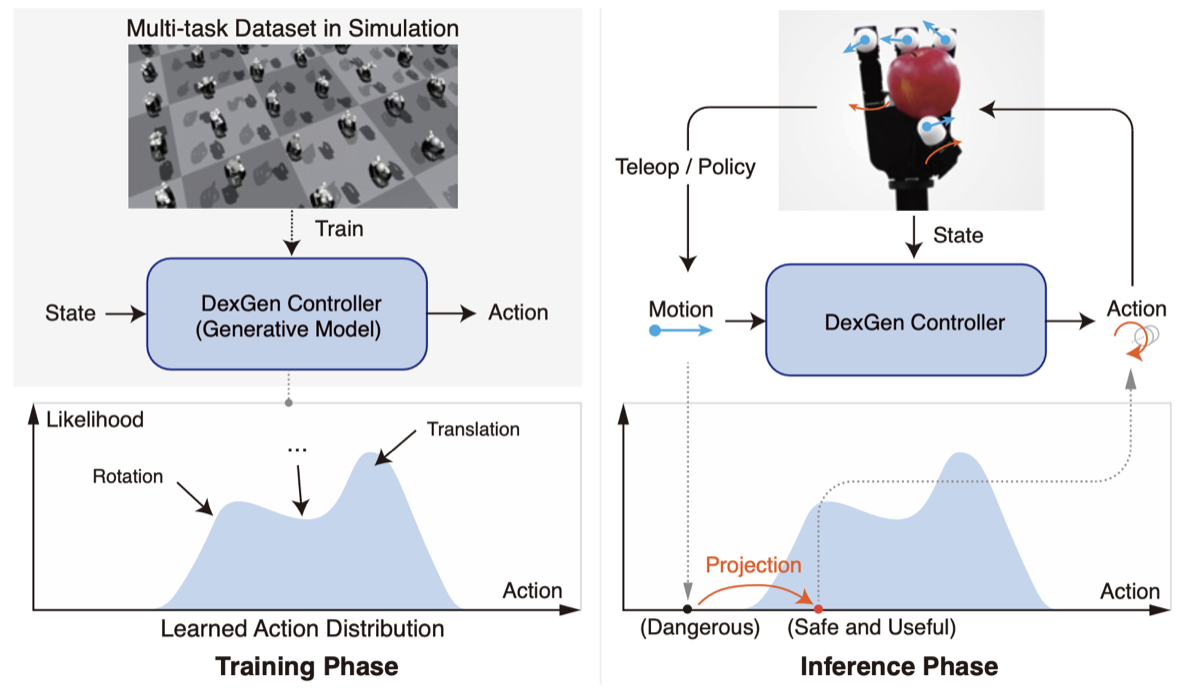
DexterityGen
A foundation controller that produces unprecedentedly dexterous robot hand behaviors — threading syringes, twirling pens, using screwdrivers — from a single learned policy. Accepted at RSS 2025 (paper).
GeoRT — Geometric Retargeting
A principled, ultrafast neural algorithm for retargeting human hand mocap to dexterous robot hands. Trains in 1–2 minutes and deploys in a few lines of Python. Published at IROS 2025 (paper).
Tactile Beyond Pixels (Sparsh-X)
Multisensory touch representations that fuse Digit 360's tactile image, audio, IMU and pressure into a single embedding for contact-rich robot manipulation. Accepted at CoRL 2025 (Oral) (code, paper).
Sparsh-Skin
Self-supervised perception for tactile-skin covered dexterous hands. Provides embeddings for magnetic-skin tactile data on Allegro / Digit Plexus hands; powers downstream contact-localization and dexterous manipulation. Accepted at CoRL 2025 (code).

Digit 360
A modular, high-resolution (~8.3 million taxel) tactile fingertip that captures multi-modal touch signals (force, vibration, audio, proximity, thermal) and processes them on-device. Co-developed at Meta FAIR with GelSight Inc. Lambeta, Wu, Sengül, Most, Black, Sawyer, Mercado, Qi, Bodduluri, …, Calandra (2024).
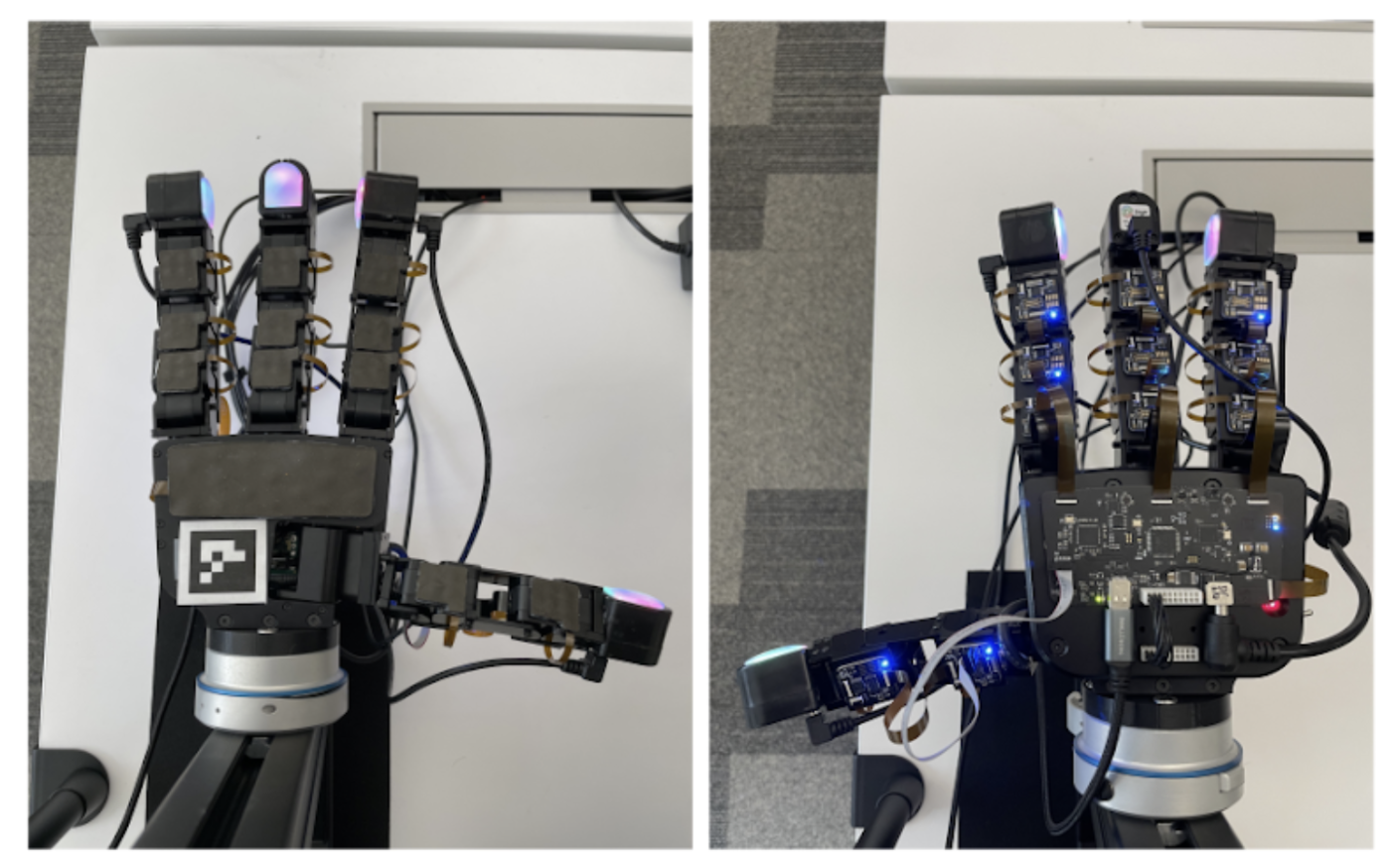
Meta Digit Plexus
An open hardware-software platform that standardises how tactile sensors (Digit, Digit 360, ReSkin) and end-effectors integrate onto a robot hand. Provides a single-cable hand-to-host interface for fingertips, fingers, and palm sensors, with Python and ROS 2 control. Partnered with Wonik Robotics on a next-gen Allegro Hand.

AprilTag Generator
A small browser tool to generate AprilTag 2 and AprilTag 3 markers of any family and size, ready to print or save as SVG. Useful when you need fiducials in a hurry for a robotics demo.

MBZIRC 2020 — Autonomous Wall Building with a Swarm of UAVs
Designed the system architecture and coding stack for a swarm of drones that autonomously picked, transported, and placed bricks to build a wall. Implemented perception, localization, and computer-vision pipelines for Challenge 2 of the Mohamed Bin Zayed International Robotics Challenge.
Publications
Dexterity from Smart Lenses: Multi-Fingered Robot Manipulation with In-the-Wild Human Demonstrations
IEEE International Conference on Robotics and Automation (ICRA), 2026. [project, arXiv]
Tactile Beyond Pixels: Multisensory Touch Representations for Robot Manipulation
Conference on Robot Learning (CoRL), 2025. [project, code, arXiv]
Geometric Retargeting: A Principled, Ultrafast Neural Hand Retargeting Algorithm
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2025. [paper]
DexterityGen: Foundation Controller for Unprecedented Dexterity
Robotics: Science and Systems (RSS), 2025. [arXiv]
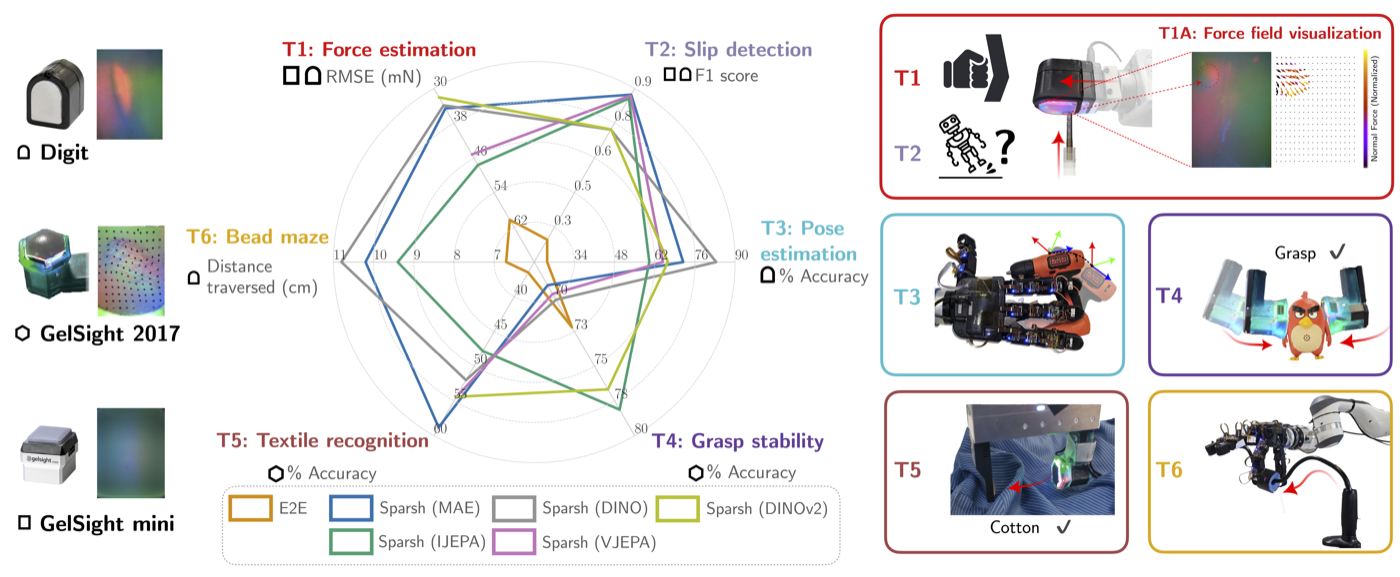
Sparsh: Self-Supervised Touch Representations for Vision-Based Tactile Sensing
Conference on Robot Learning (CoRL), 2024. [arXiv]
PARA-FM: Graphical User Interface for Emergency Flood Planning and Management
5th World Congress on Disaster Management, Vol. II, pp. 100–106, 2022. [chapter]
A Bifurcated Gain Adaptation Strategy in Sliding Mode Control with Chattering Alleviation for High Fidelity Operations
American Control Conference (ACC), pp. 2139–2144, 2021. [paper]